Contents:
Top Page 研究内容の紹介
 紹介ポスター 二足歩行ロボット ロボット車椅子 移動ロボット 冗長ロボット ロボットアーム
紹介ポスター 二足歩行ロボット ロボット車椅子 移動ロボット 冗長ロボット ロボットアーム発表論文等 研究室メンバー 講義等資料関係 Softball Local Area::
Local Page Odalab BBS
Link:
電子光工学科 大学ホームページ 学内向けe-Learning
 ポータルサイト
ポータルサイト
Oda Laboratory
公立千歳科学技術大学
理工学部
電子光工学科
北海道千歳市美々758-65
目次 ( 紹介ポスター )
二足歩行ロボットの安定歩行制御
ロボットの仕様
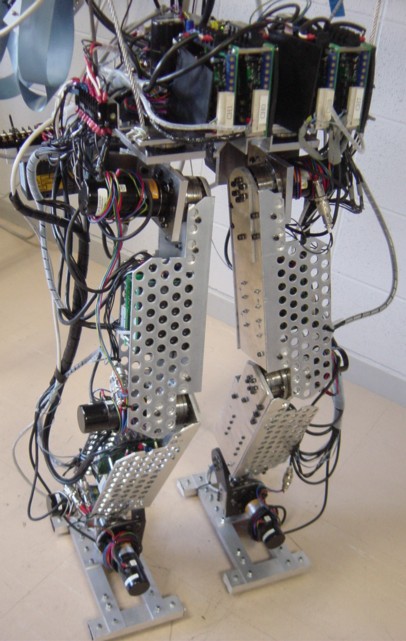
Spec.)
12DOF, 12 DC Motors( 60W X 12: SANYO DENKI Super-L & V),
Motor Driver: TITech Driver PC-0121-1 x12(Current Control),
Gear: Harmonic Gear(2X 1/120 , 4X 1/100 per leg, HDS CSF Unit-Type),
Weight: approx. 35Kg,
Sensor: Laser Distance Sensor(LK-500,Keyence) & Acceleration Sensor(Analog Devices) & Vision Sensor(Flea2,Point Grey Research) & Force Sensor(Minebea),
CPU: Pentium4 2.8GHz (External PC),
OS: Fedora 9 RT-Preempt Linux( RT-Preemption Patched Kernel),
Network Boot without HDD(PXE Boot),
I/O Interface: 16chAD/DA/Enc. 07-0003-01 General Robotix Inc.,
内部構成図(配線図)制御ブロック図2012-2013, Updated...
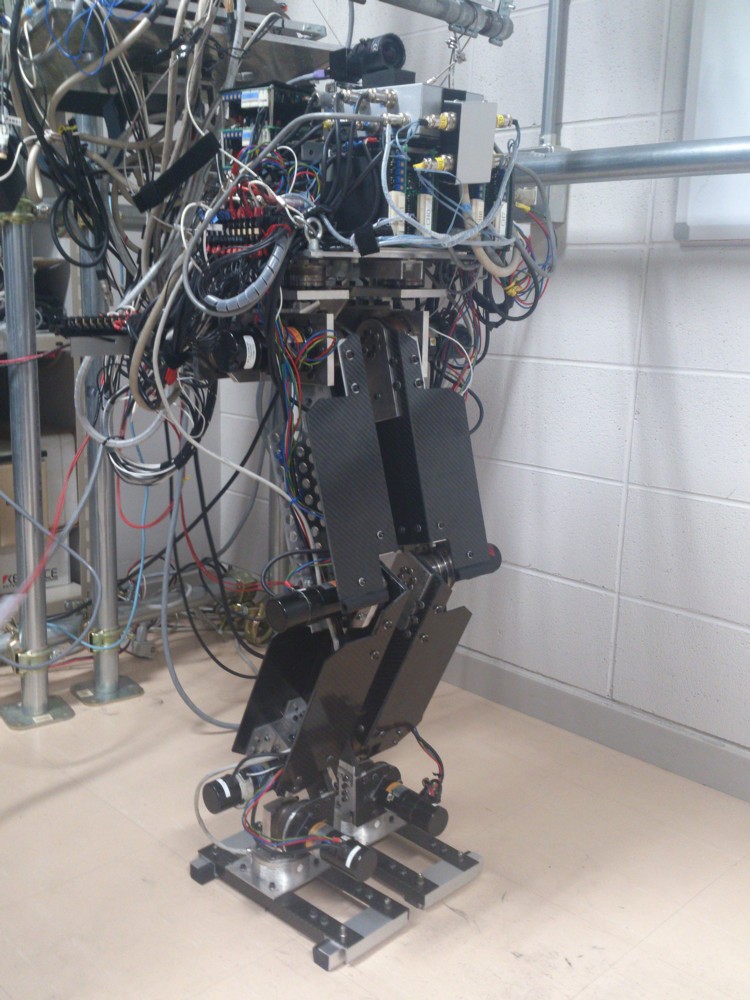
Main Material: Carbon FRP (CFRP) Force Sensor: OPFT-1kN-CH-C, Minebeaレーザセンサや視覚センサによる歩行安定化モーション制御
二足歩行ロボットの足首関節の柔軟性と歩行運動の安定性の関係に着目した研究を進めています。 足首関節に構造的に柔軟性を持つことは,着地衝撃の低減に非常に効果的な側面がある一方, ロボットにとって低剛性要素は共振的な振動を誘発し,通常のフィードバック制御での対処は困難です。 また,歩行時においては振動的な挙動から床面と足裏の接地能力が著しく低下してしまいます。 通常,足首や足裏に内蔵した力センサや圧力センサの活用により, ZMP(ゼロモーメントポイント)と言われる歩行安定指標を基に歩行姿勢の修正を行うことが一般的ですが, 安定的に床面と設置している状況を維持することが不可欠となってしまいます。
そこで,ロボット腰部に配置したレーザ変位センサを活用し, 歩行制御系に振動抑制効果を持つ等価的な反力フィードバックを導入した新規の制御手法を提案しました。 足首で生じている構造的な変形量をリアルタイムに推定し,重心を2慣性バネマス系でモデル化することで, バネ反力の等価的なフィードバック系を構成しています。 これにより,ロボットの重心応答に生じる振動的挙動を抑制するとともに,床面と足裏の接地能力向上にも貢献します。 またレーザセンサによる非接触型のセンシングを採用していることから, 足裏が浮くような大きな外力が作用した場合においても姿勢の安定化効果を維持できる点が特徴です。
上記のアプローチは,ロボットの構造変位をZMPの観測に活用していることと等価であり, 現在研究室では,レーザセンサの代わりに視覚センサ(Fig.1(b), Fig.1-3)を搭載して視覚情報から 歩行姿勢の安定化(動的バランスの制御)を実現する手法へと拡張を行っています。 Fig.1-3の歩行映像では,足部の力センサ情報を一切使用せずにビジョンセンサのみで 安定歩行を実現しているところが大きな特徴です。つまりビジュアルフィードバック(ビジュアルサーボ)により 安定化を達成しています。 Fig.1-4には外力に対してコンプライアント(従順)な応答特性を示す動画を掲載しています。 制御系は重心と遊脚の加速度コントローラ(外乱オブザーバに基づくロバスト制御)をベースにしており, 視野環境の視覚情報のみを用いて(力センサ情報を一切使用せず), このような柔らかい挙動を達成することができます。

(a)レーザセンサ (b)ビジョンセンサ
Fig.1-1 各種センサによる安定化
Fig.1-3 ビジョンセンサのみによる二足歩行ロボットのデモ動画(WMV版へのリンク)
ビジュアルフィードバックによる旋回方向(進行方向)制御
一般的にロボットは軽量かつ頑丈(高い剛性)に機械設計を行うことで精密な制御を目指しますが, 人間を例にとると足首関節や足裏には着地時のショックを和らげるよう柔軟要素が存在し, 歩行運動の安定化に重要な役割を果たしていると考えられます。 小田研究室はその点に着目した研究成果を発表してきていますが, 新たに柔軟脚によって軸足がねじれる効果を上手に活用して,目的の方向に歩行していく制御手法を開発しました。 ロボット上体の運動の反動トルク(人間で言えば,手の振りや腰のひねり)によって接地している足にねじれ変形を生じさせて, 前方の目的の方向に向かっていくという原理です。前方の物体の認識のためにカメラを搭載して, その画像認識結果を基にリアルタイムに上体のひねり運動(今回のロボットでは腰部の回転運動)を調整しています。
その動画を以下のFig.1-6に掲載しています。床との若干の滑りが生じてしまう場合もあるのですが, 下記動画のように手前の四角の目印に向かって歩行方向が修正されている様子が確認できます。 この成果は,2009年9月15日~16日に開催されたロボット学会学術講演会(横浜国立大学)にて小田研究室の大学院生が発表を行いました。
ロボット車椅子のモーションコントロール
ロボットの仕様

Spec.)
市販の非電動車椅子を改造電動化&コンピュータ制御系を搭載
AC Direct Drive Motors(x2) in Wheels(Wacogiken),
Weight: approx. 85Kg,
Sensor: Stereo Vision Sensor(Dragonfly2 x2,Point Grey Research),
CPU: Core2 Duo 3.0GHz for ImageProcessing WinXP PC & PentiumM for RT-Linux Motor Controller,
I/O Interface: AD/DA&Encoder Counter Board (PCI-3523A& PCI-6204 Interface Inc)
内部構成図ビジュアルフィードバックによるパワーアシスト制御
高齢者人口の増加,及び少子化に伴う介護側の負担増までも憂慮されています。ロボット技術の介護福祉面での展開も盛んに研究されており,将来的に大いに期待されています。小田研究室でもロボット電動車椅子を独自に製作してパワーアシスト技術の研究を続けてきました。
車椅子(上図)などの介護福祉ロボットに求められる基本的な機能は,自律的な動作の実現以上に、「人の行動を支援する」機能の提供が強く求められます。つまり主役は人であって,その意思やロボットへの入力を観測し,その行動を支援することが重要な役割です。提案したアプローチは、支援機能の一つであるパワーアシスト機能をビジュアルフィードバック系で構成することで,動的環境における視野内の変化に対応して操縦までアシスト可能なパワーアシスト技術を提案しました。車椅子を押すと,その力を車輪モータが援助してくれると同時に,前方から迫ってくる障害物などの運動が操作力を通じて伝わってきます。現在はさらなる実用性向上と画像処理手法の改良を行っています。
移動ロボット
Hardware Spec.)
CPU: Celeron 600MHz(PFM-F620S(AAEON), PC-104 Board Computer), OS: RT-Linux ( It is customized RedHat-Linux),
Disk: Compact Flash DISK 128MB, Network: 11Mbps Wireless LAN Sensor: Color CCD Camera, Photo Distance Sensor, Battery: 12V 2600mAh, Motor: 540Series(Mabuchi) armature current can be controlled by DA output. Steering: Steer angle is controlled by DA output, I/O Interface: PC-104 MPC104-DAC12
内部構成図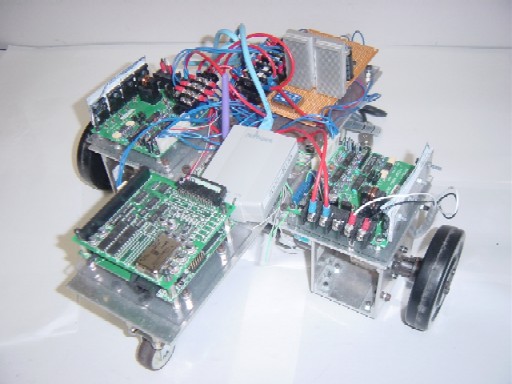
Hardware Spec.)
CPU: Arm Proccessor(Armadillo, PC-104 Board Computer), Motor Driver: TITech Driver PC-0121-1 x2(Current Control), OS: Embedded Linux,
Disk: Compact Flash DISK, Network: 11Mbps Wireless LAN through converter, Sensor: Color CCD Camera, Battery: 12V 2600mAh, Motors(x2): Super-L L402-011EL8 SANYO DENKI Inc., I/O Interface: PC-104 MPC104-DAC12, Gear: planetary gear 1/33
内部構成図冗長マニピュレータ(冗長ロボット)のモーション制御
手先作業に必要な自由度よりも、関節自由度が大きいロボットマニピュレータは冗長マニピュレータと呼ばれます。 冗長自由度を与えることにより、より高機能かつ器用な作業が可能となり、 たとえば障害物回避や他のロボットや人との協調作業による干渉回避等には非常に有用です。 人間の肩から腕の部分にも冗長自由度が存在しますが、このことは固定された物をつかんだ状態で肘が動かせることからも判断できます. 一般に任意の手先姿勢は6自由度あれば十分ですが,人間の腕には7自由度あると言われています. 研究室では、環境に応じて冗長度を上手に利用するための冗長モーションシステムの検討を行っています。


Spec.)3DOF Planar Redundant Manipulator,
AC Motors(x3)(FHA-25C-100,FHA-17C-100/50,Harmonic Drive Systems),
Sensor: PSD(Hamamatsu Photonics)&External Vision SONY CCD Camera
OS: Core2 Duo 3.0GHz for ImageProcessing WinXP PC & Pentium4 for Real-time OS VxWorks5.4,
I/O Interface: AD/DA&Encoder Counter Board (PCI-3341(DA Board)&PCI-3135(AD Board)&PCI-6205(Counter), Interface Inc)
内部構成図研究成果は,シミュレーションに加えて、 基本的に全て実機ロボットによる実験検証までを行っています. 現在,研究室には上記写真の3自由度の水平多関節型の冗長マニピュレータを製作して検証に利用しています。 これまでに発表している成果は、 視覚センサを活用した柔軟制御であり、 PSDセンサを活用して正確なマニピュレータ先端位置を計測することで、 マニピュレータの関節が自然に持つコンプライアンス(スチフネスの逆数)(特に当実機ではハーモニックギアの剛性を利用)を積極的に利用したコンプライアンス制御に関する成果を発表しています。 下に掲載している動画はデモ実験の様子であり、 力センサを用いることなくマニピュレータの姿勢部分がバネのような振る舞いとなっているのが確認できる。
2009年度からは、 マニピュレータ上部にCCDカメラを配置し、画像処理によって得られるオプティカルフローベクトル場を 効果的に活用することで、動的障害物の回避姿勢制御系の開発を行っています。 Fig.4-2はその結果の一例です。
ロボットアームのビジュアルフィードバック制御

Spec.)5DOF Industrial Robot Manipulator(Mitsubishi Move Master),
Actuators: DC Motors(x5),
Sensor: PSD(Hamamatsu Photonics Inc.)
Motor Driver: PMA4&PMA2 ServoTechno, OS: VxWorks5.4,
I/O Interface: AD/DA&Encoder Counter Board (PCI-3155(AD)&PCI-3310(DA)&PCI-6201(x2,Counter),Interface Inc.)